
写真計測による施工進捗管理システム
CAD設計と毎週の三次元再構築モデル
の正確な重ね合わせ
写真撮影
・ デジタルカメラでの通常撮影方法

ミラーレスカメラを使った手動撮影と、写真に抽出されるアクションカメラを使った4Kビデオ撮影を行っています。中小規模の建設現場に適しています。
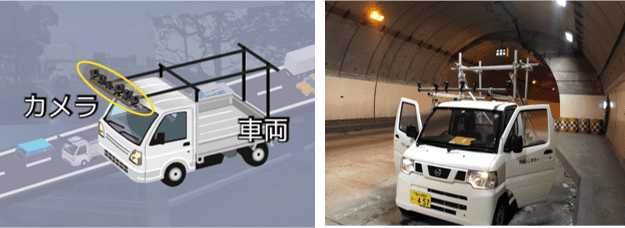
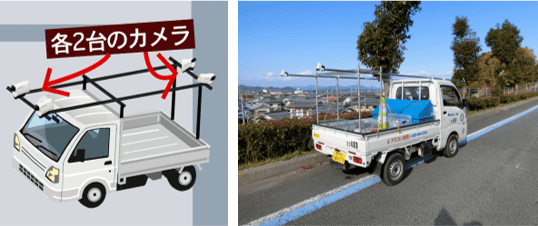
・ 車載撮影
大規模な構造(トンネル、道路、橋など)の3Dモデルを作成する際に,特に道路の場合、写真計測 の作業は交通事故の実験がある。ここでは、車両にカメラを搭載した撮影方法を提案しています。複数のアクションカメラが車両に搭載されており、車両が走行しながら、自動的に映像を撮影したり、4K動画を撮影したりします。 道路やトンネル内は都用中であり、車両を親王することで交通の流れに支障がないように廃用しています。
例(1): 北海道留萌市の大別苅トンネル建設現場
例(2): 松山市堀江国道でアスファルト整備工事
・ ドローンでの撮影
DJI MAVIC PRO 2
広い施工現場では、カメラによる手動撮影に時間がかかり、一部の部分が地上からの写真撮影の場合は覆われていませんので必要に応じてドローンを利用して写真計測を行います。ドローンの使用はより速く、良い結果が得られます。
事例: 総合治水対策特定河川工事(交付金・防災安全) 一級河川 中江川
3次元モデル
地形マッピング(DEM)
オルソモザイク地図
・ ポール付き 「低コストドローン模倣」 撮影方法 ー 新開発
PRISM 2020プロジェクトでは、ドローン禁止区域にある広い建設現場向けの新しい狙い撃ち法を開発しました。 長いポールにアクションカメラを取り付けて、上部から撮影しました。この方法により、低コストの機器を搭載したドローンと同様に、短時間で高角度から撮影データを収集することができます。 前の工事で敷地が広くて広い上に、河川敷があるため、反対側からの撮影ができないし、ドローンの持ち込みが禁止されています。

工事現場は広く、河川敷が有ってる (シータ360カメラから撮影)

ポールで写真を撮っている
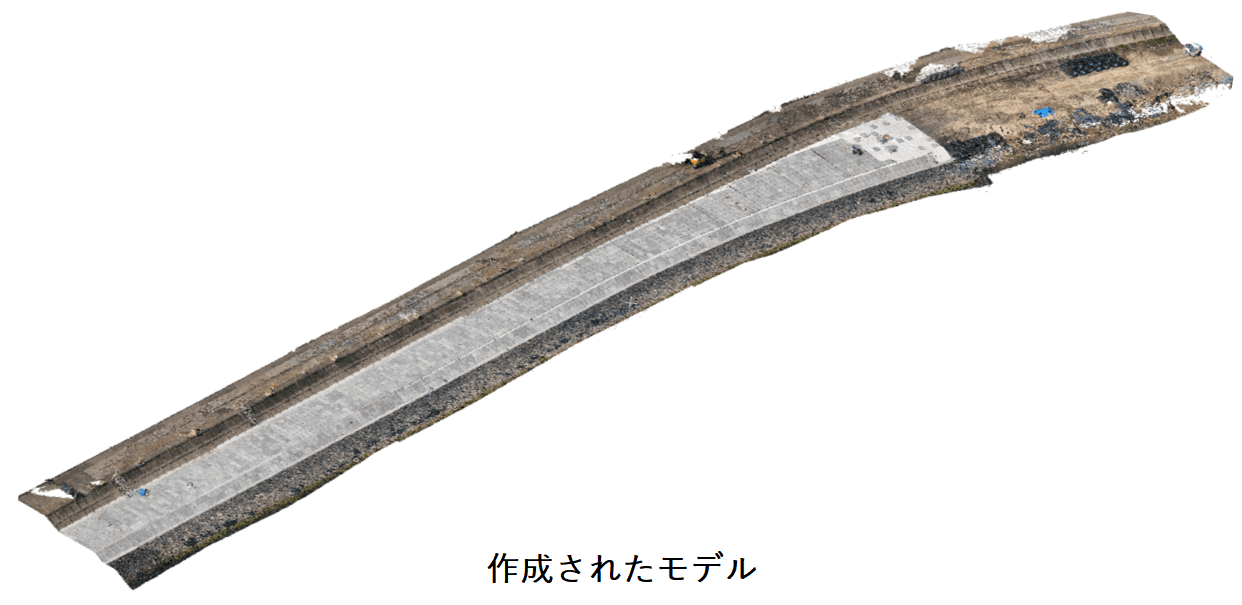
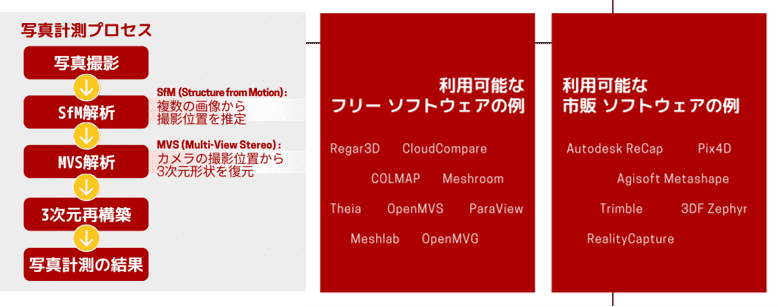
SfM解析・MVS解析・3次元再構築
4K動画から写真を抽出し、SfM/MVSによる3次元再構築には複数のソフトウェアで実施いしました。 スケール合わせでは、座標情報を活用して、モデルのキャリブレーションを行います。 座標情報を収集には、2つの方法を検討しました。
- SNIPサーバやRTK2GOを利用した自前の基地局を現場内に設置
- 安価なRTK-GNSSモジュールとラズベリーパイやESP32(マイコン)を利用した移動局の導入です。
RTK-GNSSを使用した3Dモデルの正確な位置決めとスケーリングにより、毎週の3DモデルをCAD設計データと重ね合わせることができます。 これにより、建設の進捗状況の確認と監視が可能になります。

座標情報を収集するためのRTK-GNSS調査
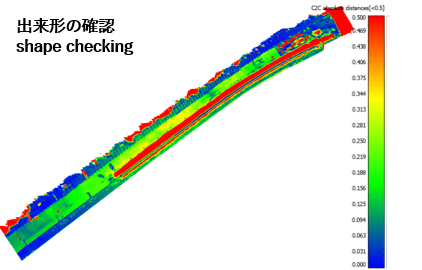
作成した点群モデルに設計図面を重ね合わせることで、設計照査が容易になります。設計に対する不整合など視覚的に分かりやすいので、施工修正を可能にしています。
座標情報を収集するためのRTK-GNSS調査
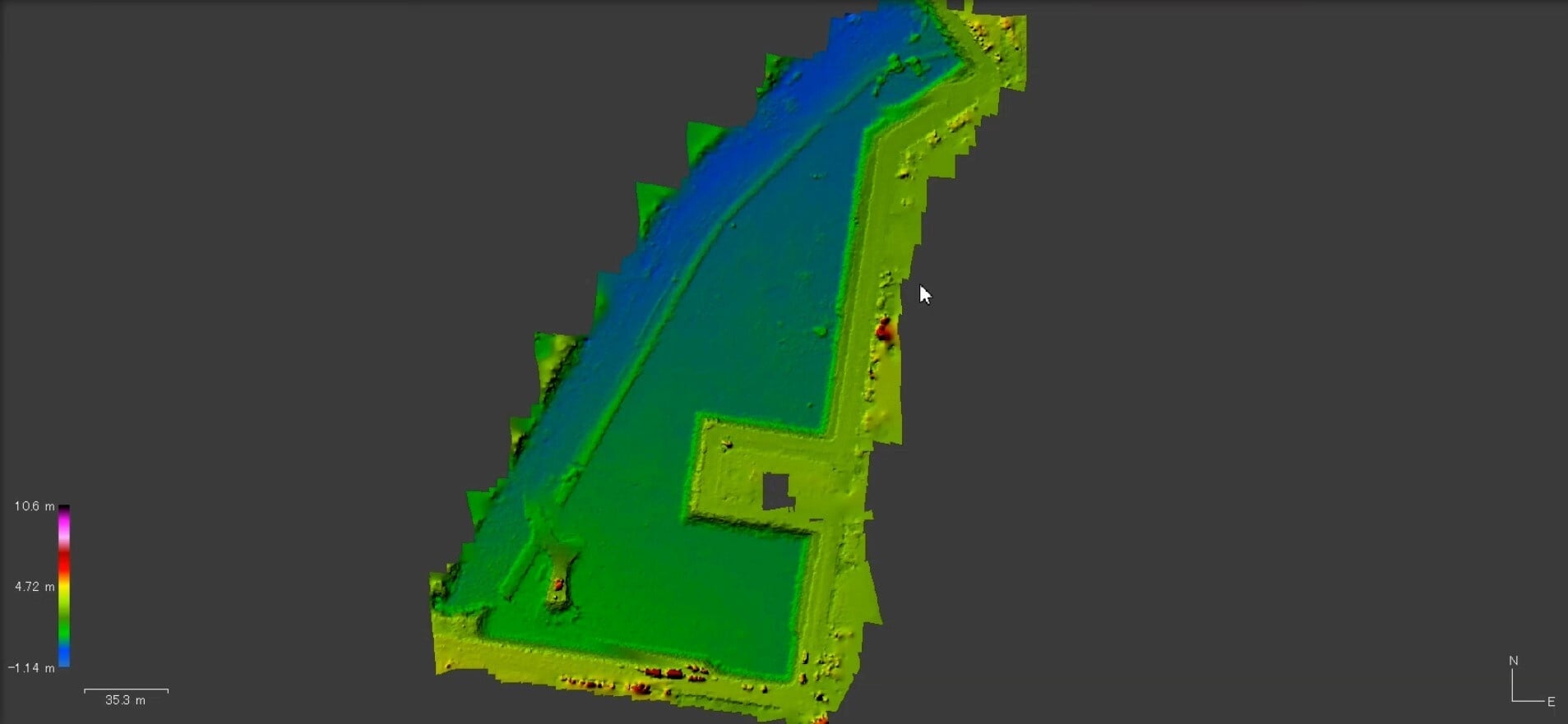
写真計測の結果
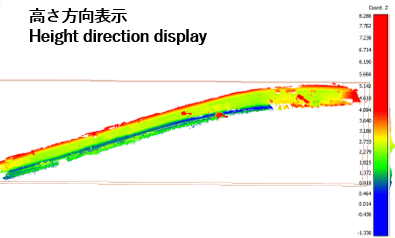
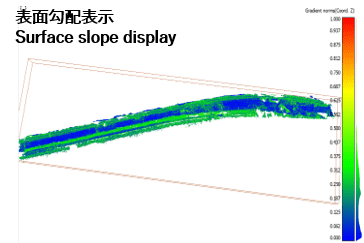
さまざまな情報を表示するためTIN、メッシュによるサーフェスデータを作成しました。スカラーフィールドスケールはモデルの標高を示し、緑色は適切なレベルを示します。
時系列の比較・出来形の確データ認 Time-series comparison / confirmation of completed data
発注者との情報共有レベル向上
4次元モデルをVR装置で確認できるようにすることで、視点を自在に変えながら施工現場状況をリアルに確認することができる。それを発注者/受注者の双方で確認することで、現場状況に関する情報共有レベルが向上する。
4次元モデルをVR装置で確認できるようにすることで、視点を自在に変えながら施工現場状況をリアルに確認することができる。それを発注者/受注者の双方で確認することで、現場状況に関する情報共有レベルが向上する。